




Version [93847]
Dies ist eine alte Version von TutoriumDokumentstrukturanalyse erstellt von MoD am 2019-02-19 10:44:41.
Tutorium: Automatische optische Inspektion
Tutor:
Jordan Zapf
Ziel des Tutoriums:
- Aufbau von Grundverständnis für Automatische optische Inspektion
- Erklärung verschiedener Bildverarbeitungsmethoden
Adressaten des Lehrangebotes:
Interessierte Studenten der Fakultät Informatik
Teilnahme:
Wird durch Rundmail bekannt gegeben.
Veranstaltungsinhalte:
Automatische optische Inspektion
Leiterplatten
Bei der Produktion elektronischer Baugruppen werden in der Regel nach dem Bestücken und Löten der Leiterplatten Kontrollen durchgeführt, um die fehlerfreie Herstellung sicherzustellen. Es kommt durchaus vor, dass beim Bestücken durch Bestückungsautomaten oder beim anschließenden Lötprozess Fehler auftreten. Fehler können z. B. fehlende oder falsch bestückte Bauteile, verdrehte oder versetzte Bauteile oder Verunreinigungen der Leiterplatte sein. Diese Fehler müssen vor dem nächsten Arbeitsschritt in der Fertigung abgefangen und sofern möglich repariert werden; andernfalls, wenn sich eine Reparatur nicht lohnt oder nicht möglich ist, wird die Leiterplatte verschrottet.
Die Kontrolle der Leiterplatten auf Fehler kann auf zwei Arten erfolgen:
- durch den Menschen
- durch Maschinen
- Menschen können Fehler übersehen
- Menschen werden müde und brauchen Pausen
- Menschen können die feinen Strukturen und Bauteile auf den heutigen Leiterplatten ohne Hilfsmittel wie Mikroskope nicht mehr prüfen
- Menschen klassifizieren Fehler unterschiedlich (wichtig bei Traceability = Rückverfolgbarkeit)
Bildaufnahme
Die Bildaufnahmen der Leiterplatten können mit Scannern oder mit Kameras erfolgen. Werden die Bilder mit einem Scanner aufgenommen, muss dieser nur einmal über die zu kontrollierende Leiterplatte fahren. Bei Kamerasystemen gibt es Systeme mit einer Kamera die von oben auf die Platte gerichtet ist, Systeme mit mehreren Kameras und Systeme, bei denen noch zusätzlich schräg angebrachte Kameras vorhanden sind. Durch den im Gegensatz zu Scannern begrenzten Sichtbereich muss die Kamera mittels einer XY-Verfahreinheit über die Leiterplatte bewegt werden. Eine Software steuert, wohin der Schlitten bewegt werden muss und wann Bilder gemacht werden sollen.
Damit die Maschine weiß, an welcher Position welches Bauteil sein muss, benötigt diese die CAD Daten der entsprechenden Leiterplatte, in denen die Position, die Bezeichnung, der Drehwinkel und ggf. noch die Gehäuseform verzeichnet sind.
Stand-Alone oder Inline
Bei Stand-Alone-Geräten wird immer eine Leiterplatte von Hand in das System eingeführt und nach der Kontrolle wieder von Hand entnommen.
Beim Inline-System werden die Leiterplatten über ein Förderband in die Maschine gebracht. Über SMEMA- oder Siemensschnittstelle und Lichtschranken wird der Transport überwacht und gesteuert und nach der Kontrolle wird die Leiterplatte auf der anderen Seite der Maschine herausgefahren.
Nur AOI oder Kombigerät
Normale Geräte bieten nur die Möglichkeit, eine optische Sichtkontrolle durchzuführen. Einige Hersteller haben jedoch auch Geräte im Programm, die zusätzlich beispielsweise eine Röntgenprüfung durchführen können und so eine Zwei-in-eins-Funktionalität bieten (AOI und AXI kombiniert).
Beleuchtung
Damit mit den Kameras oder Scannern die zu kontrollierenden Bauteile auf einer Leiterplatte ausreichend gut erkannt werden können, muss diese künstlich beleuchtet werden. Die Lichtquellen sind in der Maschine unterschiedlich angeordnet. Es gibt je nach System die Möglichkeit, den aktuellen Bildausschnitt mit Direktlicht von oben oder mit indirektem Licht von der Seite (Seitenlicht) zu bescheinen. Zusätzlich können je nach System auch noch verschiedenfarbige Lichtquellen benutzt werden. In den Geräten früherer Tage wurden zum Teil Leuchtstoffröhren für die Beleuchtung benutzt. Da jedoch die Beleuchtungen ständig abgewechselt werden müssen, werden die Leuchtstoffröhren durch das ständige Ein- und Ausschalten schnell zerstört. Moderne Geräte benutzen daher LEDs. Diese dunkeln zwar mit der Zeit ein wenig nach, dies kann jedoch durch eine Kalibrierung (Grauwertabgleich), die in bestimmten Abständen durchgeführt wird, kompensiert werden.
Offen oder geschlossen
Offene Systeme besitzen keinerlei Abschirmung gegen den Einfall von Störlicht. Fällt Sonnenlicht oder das Licht einer Leuchtstofflampe auf die Leiterplatte, können die Systeme Schwierigkeiten bekommen.
Geschlossene Systeme sind gegen den Einfall von Störlichtquellen durch ein nahezu komplett geschlossenes Gehäuse und Spezialscheiben geschützt. In ihnen werden die Leiterplatten nahezu nur noch von künstlichem Licht beleuchtet. Dadurch können die Beleuchtungssituationen beliebig reproduziert und die Maschinen optimal eingestellt werden.
Analyseverfahren und Art der Bildauswertung
Die von einem Leiterplattenausschnitt mit Bauteilen gemachten Bilder werden darauf untersucht, ob das abgebildete Bauteil ordnungsgemäß bestückt und gelötet wurde.
Beim Bitmapvergleich werden die aufgenommenen Bilder mit früher aufgenommenen Vergleichsbildern von guten Bauteilen verglichen. Kommt es zu einer vorher definierten Abweichung, gilt das Bauteil als fehlerhaft.
Beim Vektorvergleich wird versucht, anhand von Hell-Dunkelübergängen das Bauteil zu finden. Daran kann man dann erkennen, wie sehr das Bauteil versetzt und/oder verdreht ist. Für die Pins kommt die gleiche Analyse zur Anwendung. Für die Lötstellenkontrolle werden dann Grauwertanalysen verwendet, bei denen in einem Messfenster, das am Ende des Pins angelegt wird, der mittlere Grauwert der Lötstelle unter einer bestimmten Beleuchtung gemessen wird.
Zusätzlich gibt es noch Systeme, die in keine der beiden oben genannten Kategorien passen und eine Mischung aus 2-Farben-Bild- und Grauwertanalyse benutzen, um Bauteile und Lötstellen zu finden.
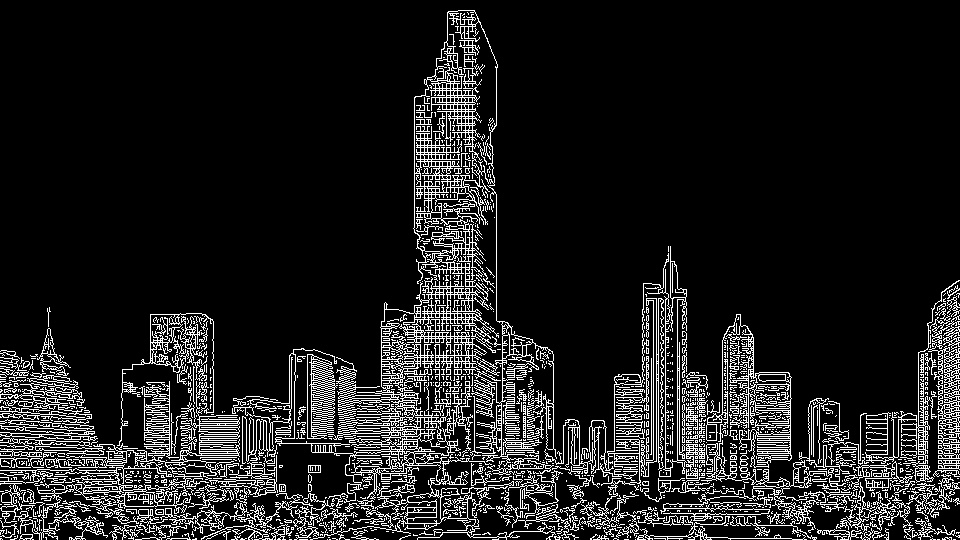
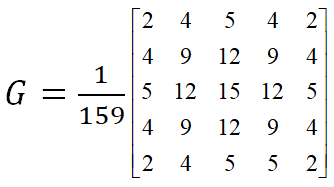
Bildverarbeitung
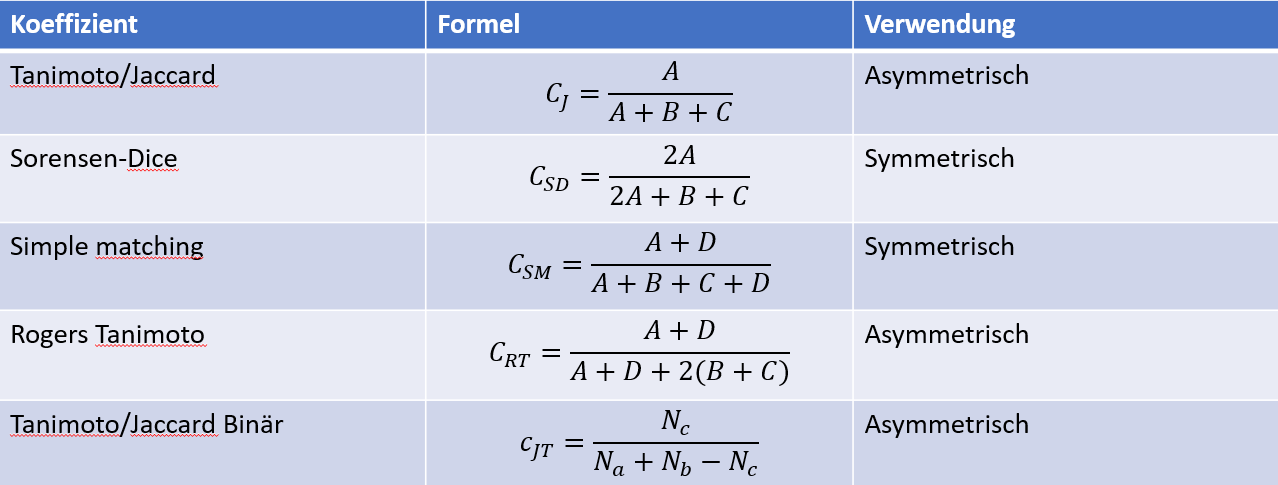
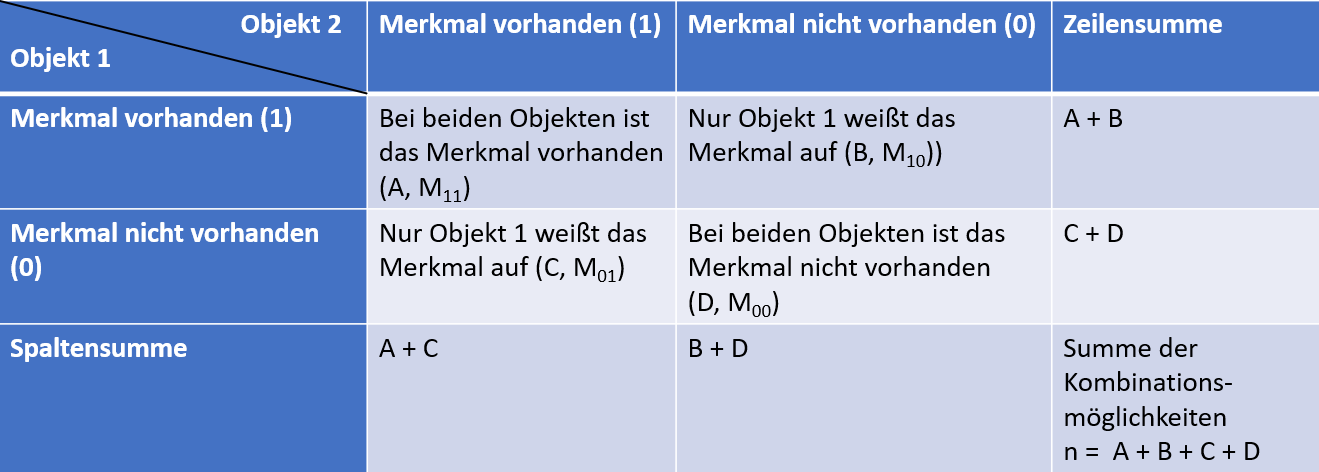
Einteilung der Objekte

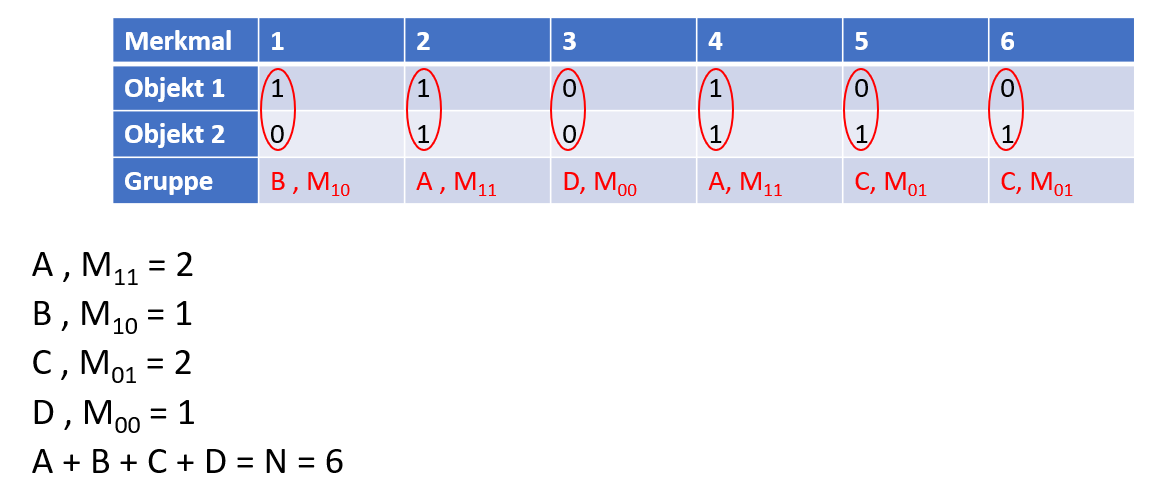
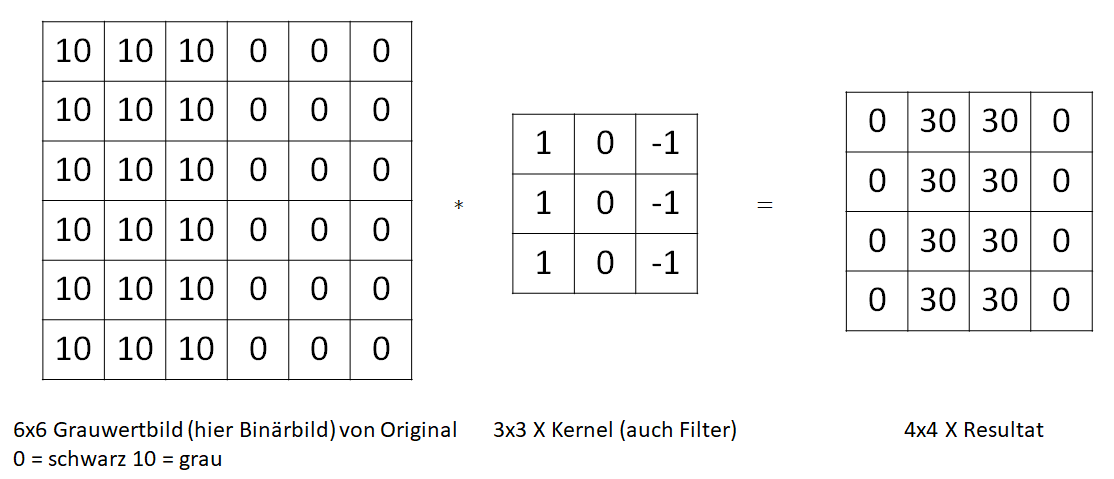
Einfaches Beispiel
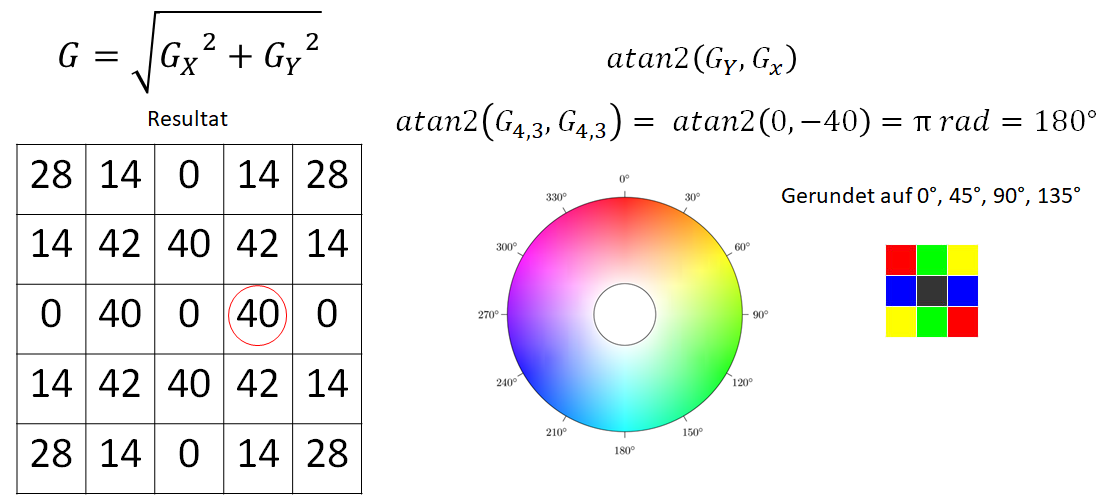
Rohdaten

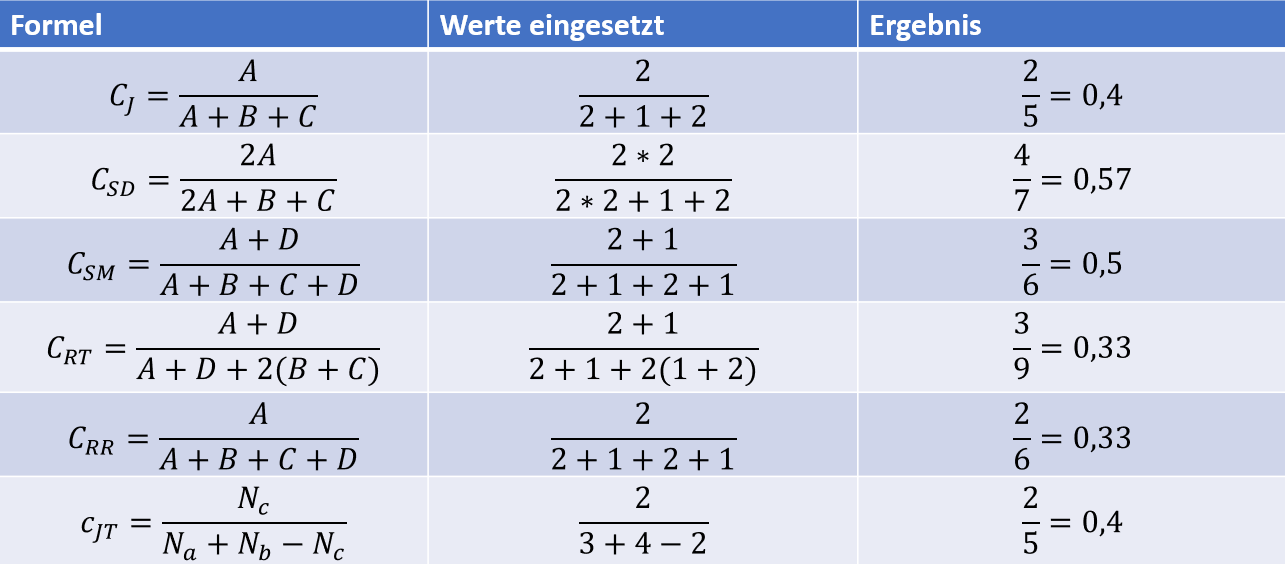
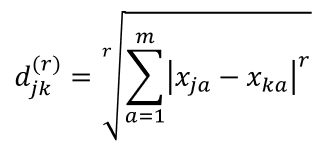
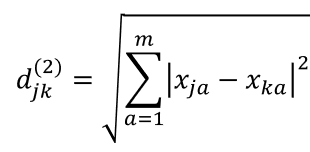
Berechnung

Großes Beispiel
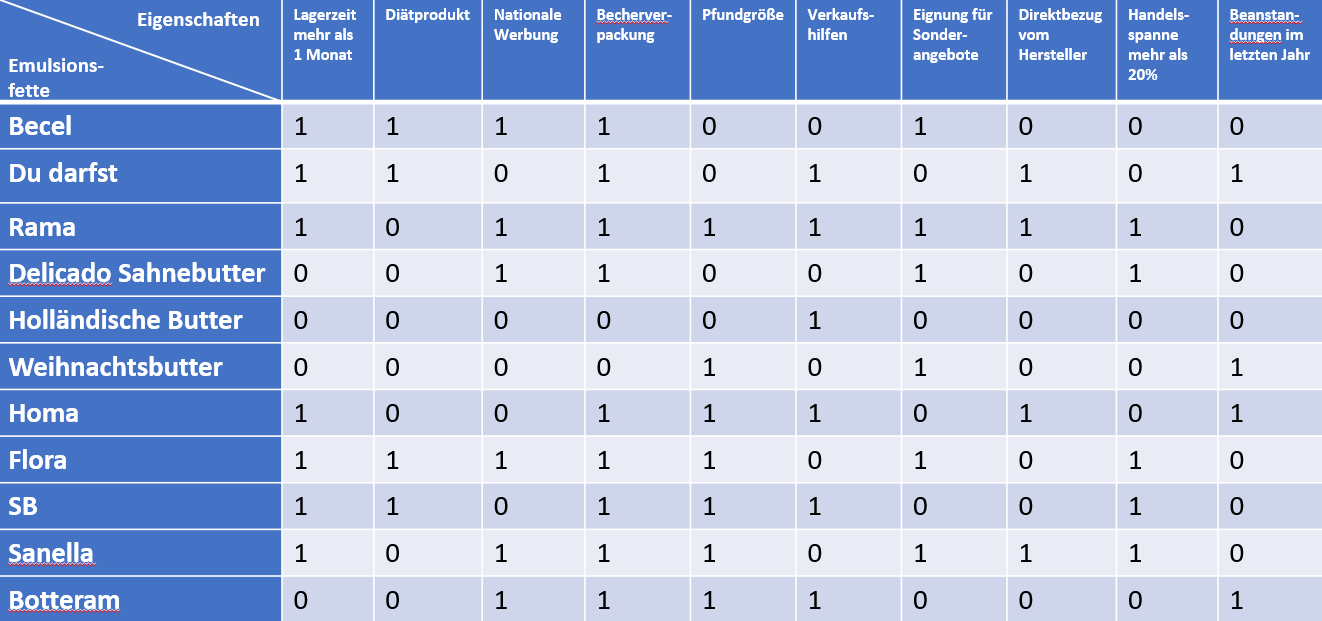
Rohdaten

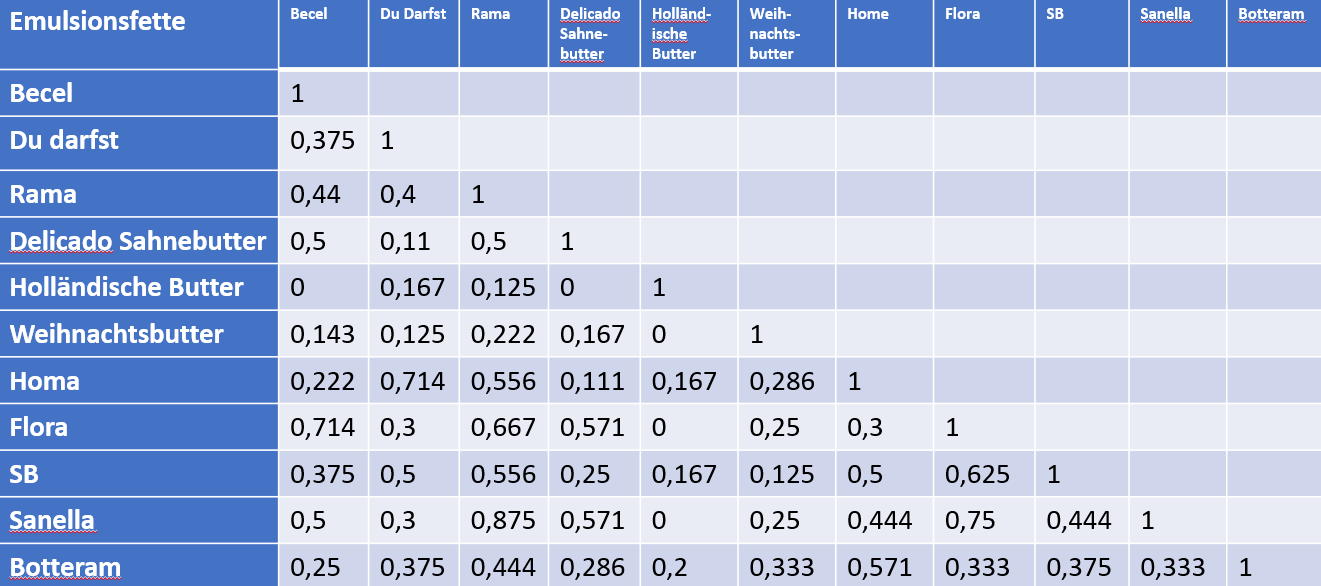
Ergebnis Tanimoto/Jaccard

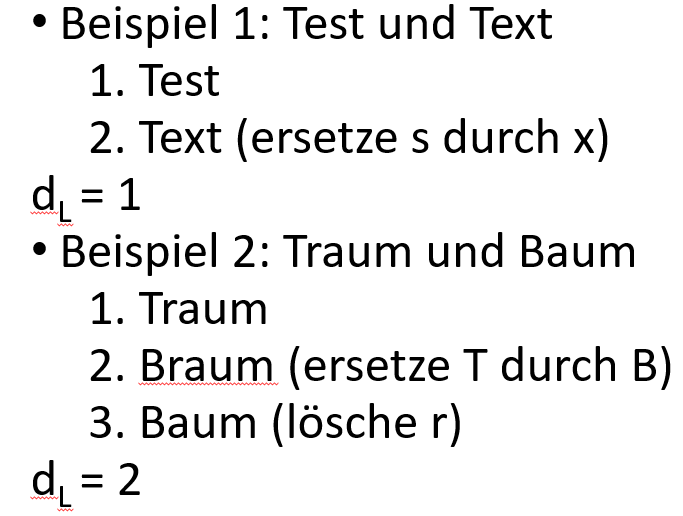
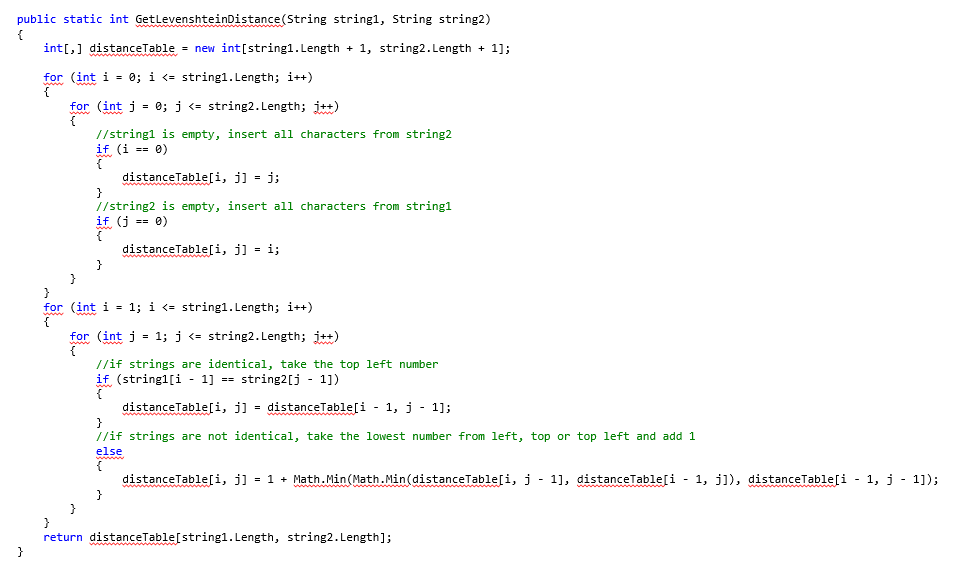
Levenshtein-Distanz
- minimale Anzahl von Einfüge-, Lösch- und Ersetz-Operationen, um die erste Zeichenkette in die zweite umzuwandeln
- benannt ist die Distanz nach dem russischen Wissenschaftler Wladimir Lewenstein (engl. Levenshtein), der sie 1965 einführte
- mathematisch ist die Levenshtein-Distanz eine Metrik auf dem Raum der Symbolsequenzen
Einfache Beispiele

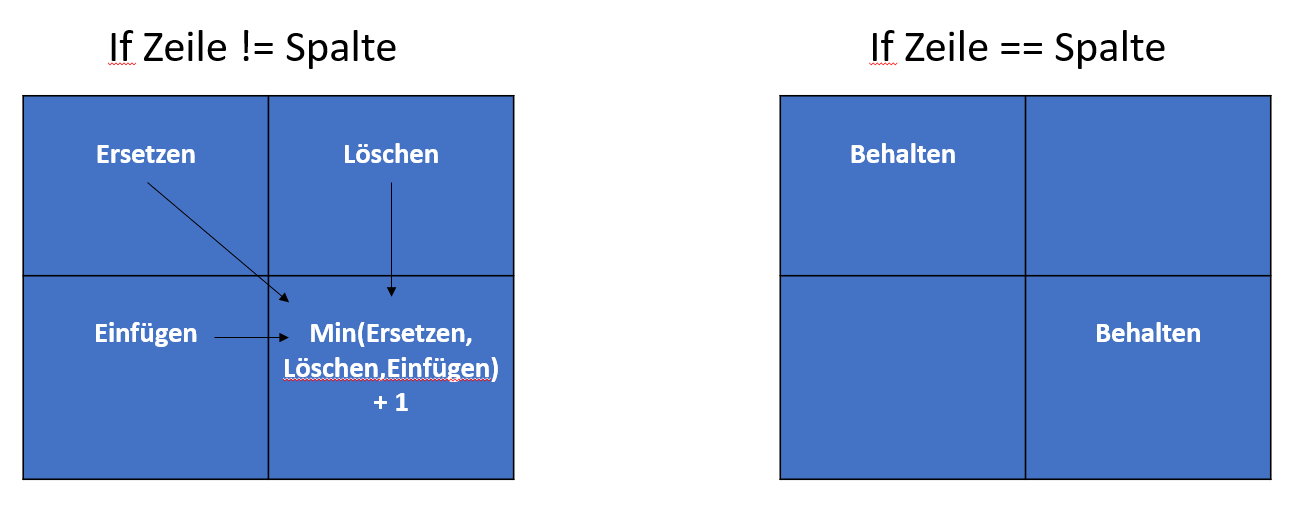
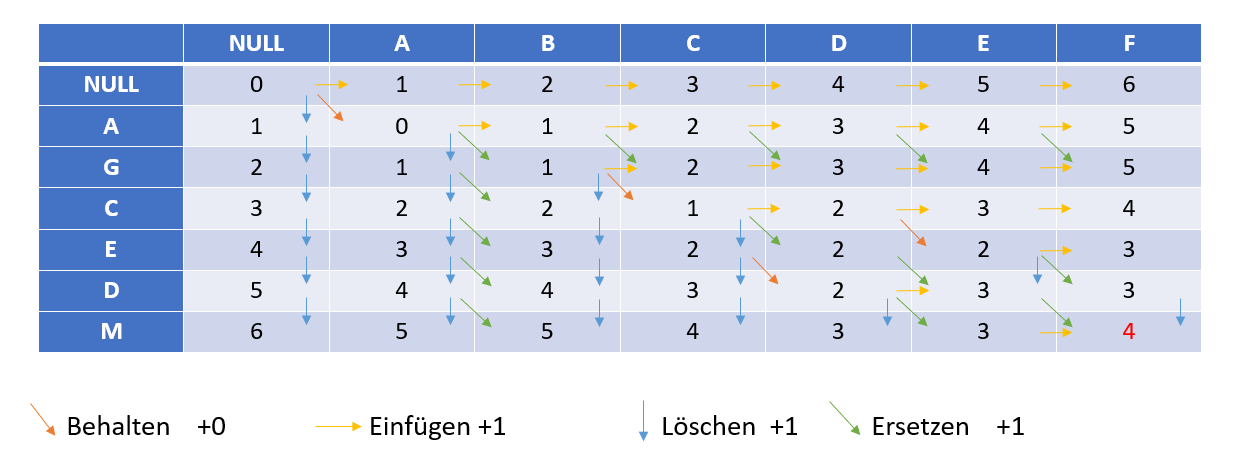
Berechnung


Levenshtein-Distanz in C# umgesetzt

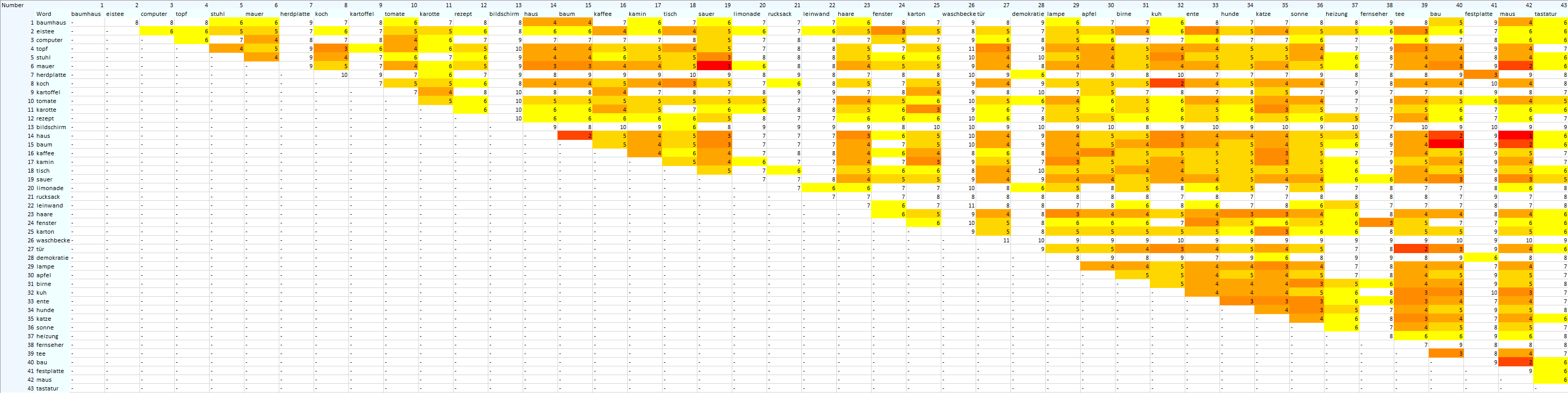
Eigenes Programm zum Vergleich von beliebig vielen Wörtern miteinander

CategoryTutorienFKITWS1819
| File | Last modified | Size |
|---|---|---|
| absoluteKantenstaerkeUndKantenrichtung.png | 2023-10-06 18:37 | 144Kb |
| ak1.png | 2023-10-06 18:37 | 36Kb |
| ak2.png | 2023-10-06 18:37 | 52Kb |
| ak3_2.png | 2023-10-06 18:37 | 28Kb |
| ak4.png | 2023-10-06 18:37 | 41Kb |
| ak5.png | 2023-10-06 18:37 | 60Kb |
| ak6.png | 2023-10-06 18:37 | 67Kb |
| bilateral.png | 2023-10-06 18:37 | 481Kb |
| bilateralFilter.jpg | 2023-10-06 18:37 | 141Kb |
| cannyEdgeDetector1.jpg | 2023-10-06 18:37 | 214Kb |
| cannyEdgeDetector2.jpg | 2023-10-06 18:37 | 188Kb |
| cannyEdgeDetector3.jpg | 2023-10-06 18:37 | 493Kb |
| clahe.jpg | 2023-10-06 18:37 | 158Kb |
| cluster.png | 2023-10-06 18:37 | 5Kb |
| euklidisch.png | 2023-10-06 18:37 | 4Kb |
| gauss.png | 2023-10-06 18:37 | 5Kb |
| gaussianFilter.jpg | 2023-10-06 18:37 | 106Kb |
| gray.jpg | 2023-10-06 18:37 | 131Kb |
| histogram.png | 2023-10-06 18:37 | 87Kb |
| histogramEqualization.jpg | 2023-10-06 18:37 | 132Kb |
| histogramEqualization1.png | 2023-10-06 18:37 | 40Kb |
| histogramEqualization2.png | 2023-10-06 18:37 | 176Kb |
| histogramEqualization3.png | 2023-10-06 18:37 | 171Kb |
| kantendetektion.png | 2023-10-06 18:37 | 28Kb |
| ld1.png | 2023-10-06 18:37 | 29Kb |
| ld2.png | 2023-10-06 18:37 | 24Kb |
| ld3.png | 2023-10-06 18:37 | 34Kb |
| ld4.png | 2023-10-06 18:37 | 29Kb |
| ld5.png | 2023-10-06 18:37 | 120Kb |
| manhattan.png | 2023-10-06 18:37 | 7Kb |
| manhattan2.png | 2023-10-06 18:37 | 3Kb |
| median.png | 2023-10-06 18:37 | 17Kb |
| medianFilter.jpg | 2023-10-06 18:37 | 123Kb |
| normalizedBlockAndGaussian.png | 2023-10-06 18:37 | 19Kb |
| normalizedBlockFilter.jpg | 2023-10-06 18:37 | 104Kb |
| schwellenwertbildungUndHysterese.png | 2023-10-06 18:37 | 24Kb |
| sobel.jpg | 2023-10-06 18:37 | 164Kb |
| sobeloperator.png | 2023-10-06 18:37 | 27Kb |
| sobelx.jpg | 2023-10-06 18:37 | 174Kb |
| sobely.jpg | 2023-10-06 18:37 | 176Kb |
| source.jpg | 2023-10-06 18:37 | 76Kb |
| verteilung.png | 2023-10-06 18:37 | 5Kb |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Diese Seite wurde noch nicht kommentiert.